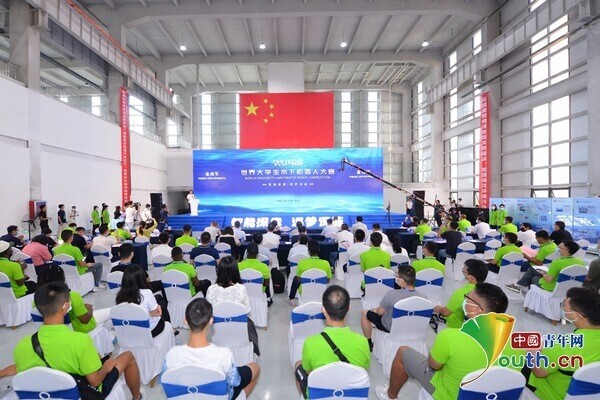
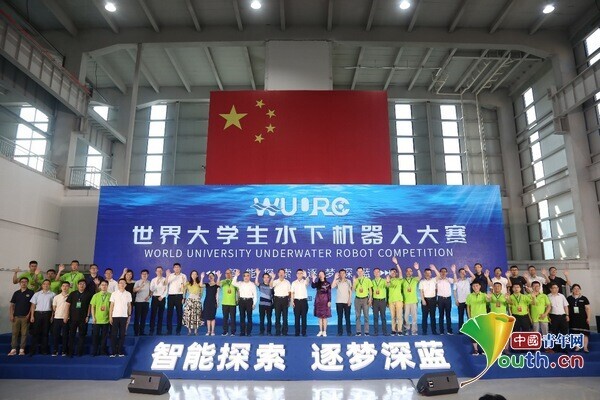
中国青年网北京8月19日电(记者 李婧怡 通讯员 朱虹 郭健楠)花式过门、目标撞击、水底抓取、听声浮圈,不仅能看还能听,水下机器人可以多智能?8月18日,由中国造船工程学会主办,哈尔滨工程大学承办的首届世界大学生水下机器人大赛在哈尔滨工程大学青岛创新发展基地开幕。大赛分为自主式水下机器人、无人遥控水下机器人、创意概念类三个赛道。来自清华大学、上海交通大学、哈尔滨工业大学、俄罗斯机器人发展中心、荷兰代尔夫特理工大学等11个国家,39所院校和机构的127支队伍在水下竞技。
中国造船工程学会常务副秘书长金向军、国家创新示范区古镇口核心区管委会副主任李福斌、中国造船工程学会科普部部长刘蕾、中国造船工程学会首席科学家田冰出席开幕式,哈尔滨工程大学校长姚郁和俄罗斯马林内特海洋行业协会主席亚历山大·平斯基分别在线上线下致辞。开幕式由哈尔滨工程大学校长助理赵玉新主持。

姚郁表示,大赛为世界大学生提供了学习、交流和分享水下机器人技术的重要平台,将进一步激发世界青年学生的创新热情,促进水下机器人领域人才的深化培养和技术的不断创新。哈尔滨工程大学将以承办首届大赛为契机,持续推动无人智能与“三海一核”办学特色深度融合,积极打造水下无人领域高水平科技创新交流平台,为加快建设海洋强国作出更大贡献。

亚历山大·平斯基表示,科技是开发海洋的钥匙,在海洋中对海洋电厂、海洋牧场、海洋矿业平台等设施管理、维护极具风险,而机器人技术将解除这种风险。非常高兴有这么多出色的年轻人、优秀的团队来参与这次大赛。

会议还举办了水下无人智能技术学术论坛,论坛设置3个分论坛,14场精彩讲座,国内无人系统及相关技术领域著名专家学者就该领域的前沿技术和研究热点进行交流。
模拟海底工作场景 水下机器人能看会听
ROV是一种应用于水下极限运动的机器人,现已成为代替人类在恶劣且危险环境中作业的重要工具。ROV赛道不仅着眼当下,还着眼未来,在水下模拟了海洋牧场、矿石采集、石油勘探等真实场景,选手要通过手中的手柄控制机器人完成饲料投放、船体检修等一系列精准操作,对机器人的图传效果、稳定性和运动性能等水下综合能力提出了要求。
此次赛事特别增设的船体检修环节是一大亮点,机器人需要在水底捡起三个圆环“螺母”,套在一个“螺丝”上。为了完成精细操作,选手们在机械臂上下足了功夫,北京信息科技大学为机械手设计了挂勾,中国人民解放军海军工程大学给机器人准备了3只手。
“水下机器人是一个多学科交叉的产物,在自主研发的过程当中,我们自学了流体力学、材料、机械等多学科的专业知识,动手实践能力也得到了提高。”哈工程船舶工程学院学生张子谦说。
相对ROV赛道, AUV赛道更体现机器人的智慧,在水下,机器人不仅有头脑,还能看会听。“AUV是带脑子执行任务的水下机器人。”来自哈工程E唯协会队长李辰骥介绍。AUV又叫无人无缆水下机器人,下水后,不需要人的操作可以独立完成各种任务。比赛中,机器人要在水下完成过门、撞球、精准作业、听声浮圈等一系列挑战,对机器人的导航能力和自我感知能力提出了极高要求。为了能让机器人精准定位,各团队各出奇招,有的团队自主研发了惯导和DBL混合导航,还有的采用了先进的视觉动力定位系统。

为了赢得高分,各机器人在第一关“过门”亮相时就大展才艺,每旋转1/4周得50分,一些团队旋转两周得到400满分。“红-黄-绿”选手们在岸上抽取题目,经过电脑编程后,将机器人放入水中,机器人即可根据设定程序自主在水中先后识别撞击红球、黄球、绿球。在听声浮圈环节中,机器人通过信号发出的声音找到精准位置后浮出水面。而在精准作业环节中,机器人展现出了灵巧的一面,在水底夹起高尔夫小球,再投入到并不比球大很多大篮子里。

在创意概念赛道,81组来自国内外的团队脑洞大开,展现海底高科技。来自喀麦隆的哈工程留学生团队李思特介绍,团队设计的AUV名为“双臂魔童”,特别设计了两个有6个自由度的机械臂,在双头双臂的加持下,机器人的工作范围更深更广也更省电。针对部分水下设备成本高昂、回收困难等问题,郑州轻工业大学水下环保卫士团队设计了基于3D打印技术的可生物降解水下航行器,机器人外形仿海洋生物,节省材料,降低成本,同时采用生物降解外壳不污染环境。